

飞行器种类
固定翼
飞机的机翼位置 后掠角等参数固定不变的飞机。由动力装置产生前进的推力或者拉力,这些力产生飞行器前进的速度。由速度诱导出托举起飞行器的升力.
固定翼飞机飞行需要一定的速度,不能垂直起降
民航飞机以及大部分战斗机都属于固定翼
优点: 续航时间最长、飞行效率最高、载荷最大
缺点:起飞必须要助跑,降落的时候必须要滑行
直升机
直升机动力装置带动一个或者两个主旋翼,提供托举起飞行器的升力
单旋翼直升机还需要尾桨来抵消主旋翼产生的反扭力矩
优点: 垂直起降
缺点: 相比于固定翼飞行器续航时间短,机械结构复杂,维护成本高
多旋翼
可以认为是直升机的一种,属于四个或者更多旋翼的直升机。能够垂直起降。
最常见的是四旋翼。
多旋翼机械结构非常简单,只需要将电机直接连接螺旋桨。即可实现动力系统。与传统的直升机相同,都是动力装置带动旋翼,提供托举起飞行器的升力。
不同的是,多旋翼靠改变螺旋桨的速度,从而改变拉力。同时,多旋翼可以相互抵消反扭力矩
一般受力特点:
- 合成拉力垂直浆盘,也就是机身平面
- 一般主要受拉力和重力的影响
多旋翼与四旋翼的区别:
旋翼数量的不同,功能都是一样。 都是产生拉力、俯仰力矩、滚转力矩、偏航力矩等。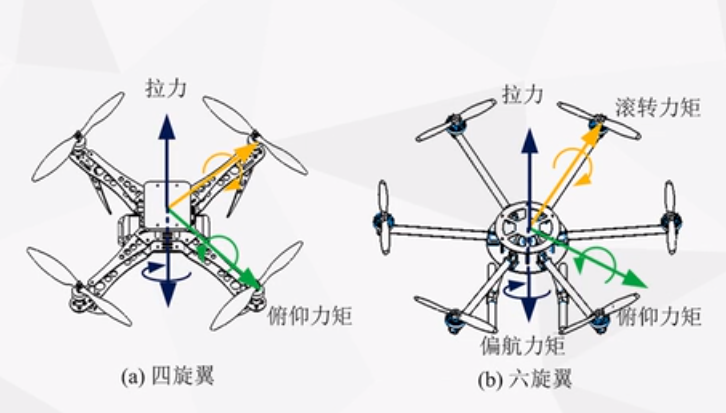
优点: 垂直起降,机械结构简单,容易维护
缺点: 载重和续航时间都比较短
复合飞行器
无人驾驶飞机与航空模型飞机的区别
无人驾驶飞机
无人驾驶飞机(Unmanned Aerial Vehicle, UAV) 简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。 微小型无人机英文: “Drone”
航空模型飞机
Model Aircraft 简称“航模”, 规定: 航空模型是一种重于空气,有尺寸限制的,带有或不带有发动机的,可遥控的不能载人的航空器
| 无人机 | 航模 | |
|---|---|---|
| 操纵方式 | 可自主驾驶(由机载电脑自动控制,或其他飞行员远程控制) | 需遥控操纵 |
| 用途 | 军事/民用特种用途 | 接近于玩具 |
| 组成 | 复杂,需要地面站 | 简单,无需地面站 |
无人机系统由: 机体、动力系统、自驾仪、任务系统、通讯链路系统、地面站组成
航模由: 机体、动力系统、简单的自稳系统、遥控器以及接收系统组成
多旋翼飞机有两种控制方式:
半自主控制方式: 航模范畴
全自主控制方式: 无人机范畴(可以由存储在机体电脑上进行自动飞行,飞控手只需要规划任务即可)
多旋翼的操控和评价
四旋翼的操控
四旋翼一般有两种模式: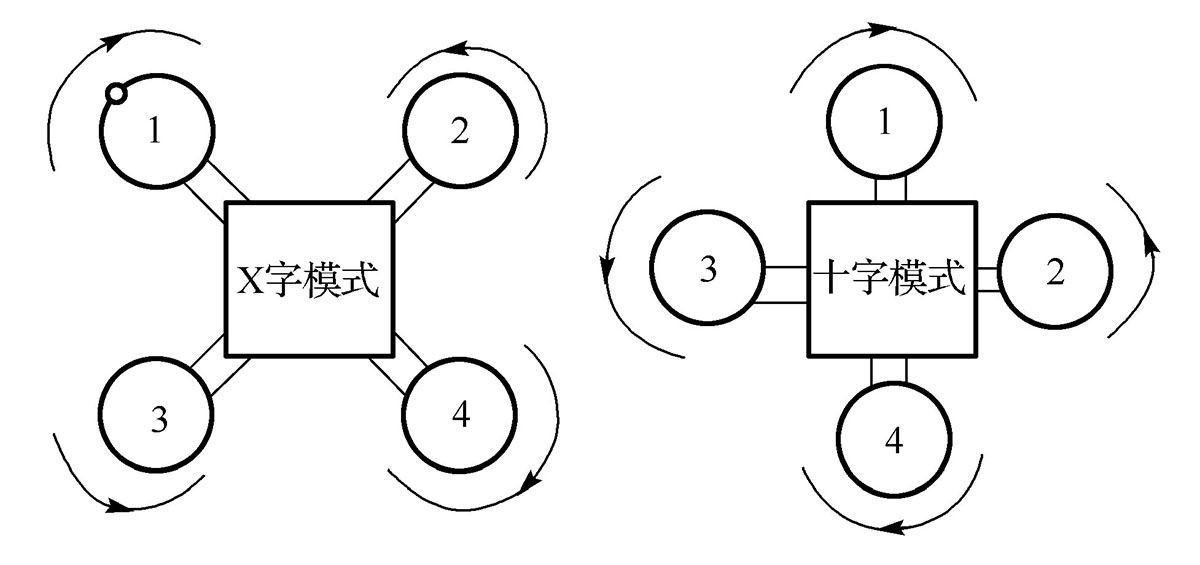
这两者原理相似,当时操作方式不一样,X模式始终有两组电机参与速度调整,十字模式一般就是一组参与.
X模式悬停
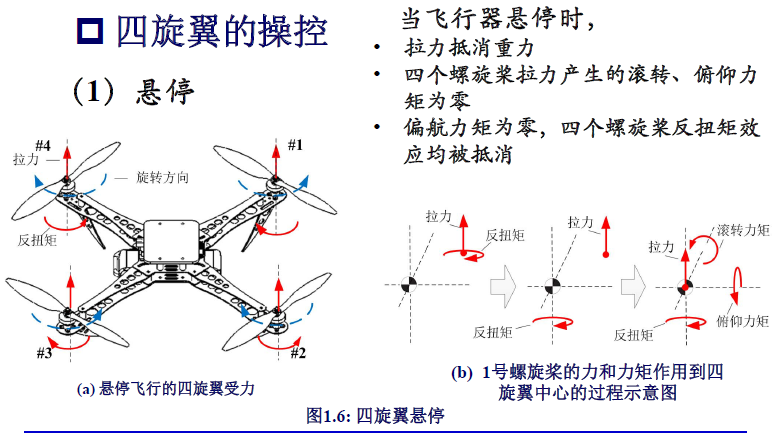
1,3 螺旋桨逆时针旋转。2,4 螺旋桨顺时针旋转 由牛顿第三定律: 任何一个力都会产生一个与之相反的作用力。 故1,3逆时针旋转会产生顺时针的扭力。 2,4顺时针旋转会产生逆时针的力。若这四个螺旋桨的转速相同。那么就会相互抵消。同时增大转速,飞机的升力增加。同时减少,升力减少。
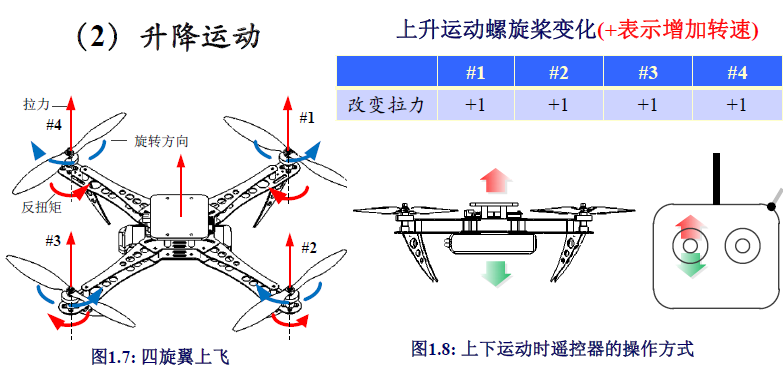
X模式升降
同时增加四个螺旋桨转速,力矩之和依然为0,但是升力!=重力 上升 或者下降
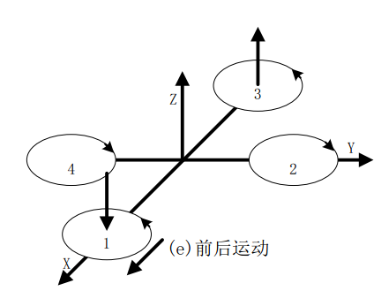
X模式前后/俯仰
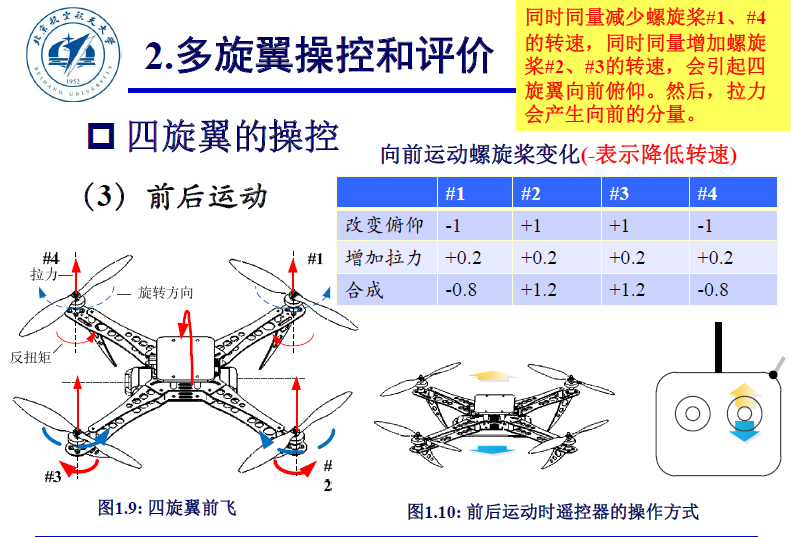
提高2,3相同转速. 减少1,4转速。形成向上的升力,机身尾部会上翘,同时,会产生水平向前的分力。这样机身俯仰了,还会向前运动
但是这里作者说的是,1,4减小的量和2,3增加的量应该一样,但是这里,我认为不是这样
注意:这里机身会先做俯仰运动,然后前后飞行,也就是说这两者是一体的
X模式左右/翻滚
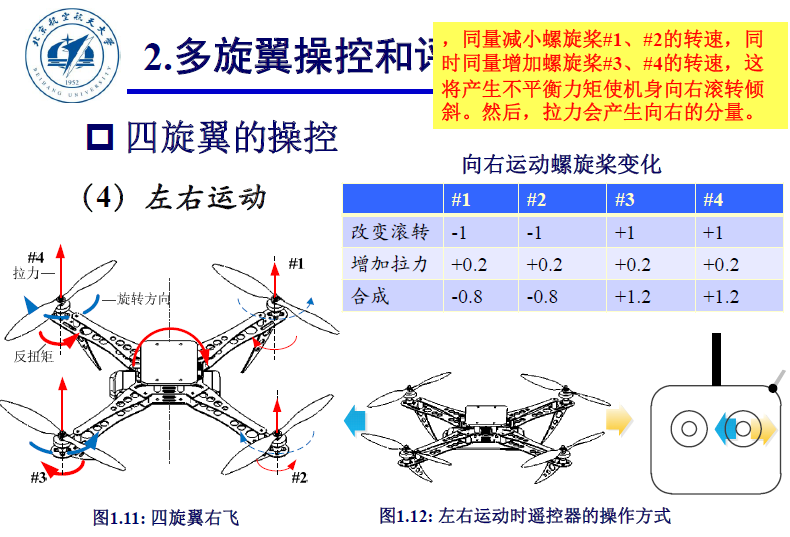
这里也是同理 为什么增加的量要和减小的量一样?提高3,4相同转速. 减少1,2转速。机身左部会上翘,同时,会产生水平向右的分力。这样机身翻滚了,还会向右运动 注意:这里机身会先做翻滚运动,然后左右飞行,也就是说这两者是一体的
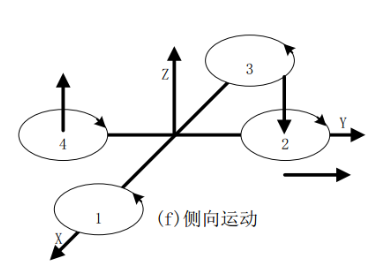
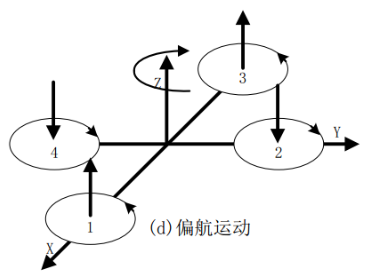
X模式偏航运动
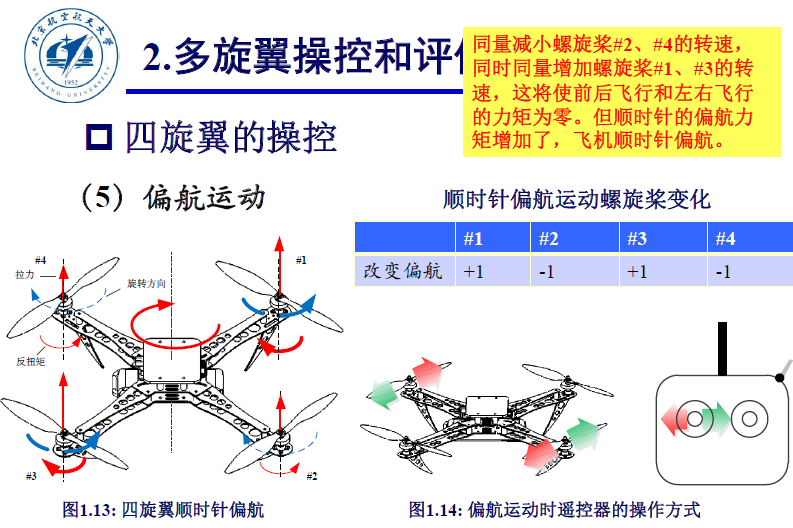
因为机身旋转会带来反扭力矩,1,3在同一条杆上,做逆时针运动,这样会产生顺时针的反扭力矩。如果不考虑2,4的影响。那么飞机会进行逆时针的旋转。为了平衡这两个货带来的影响。所以2,4的旋转方向与其相反,这样会产生逆时针的反扭力矩。当这四个的旋转速度一样的时候,就平衡了,机身不会顺时针或者逆时针偏转。现在为了让机身做偏航运动,就要让这两对力的大小不一样。如果要让机身做顺时针运动,那么就要增大1,3的转速。但是,这里PPT说的是还要减小2,4的转速。且2,4的减小量与1,3的增加量一样。 这里没有搞懂 跟上面一样 为什么要让他们的变化量一样
十字模式悬停
与上面X模式一样
十字模式升降
与上面X模式一样
十字模式前后/俯仰
这里与上面的X模式有所不同,这里只需要一组电机进行改变就是了,比如保持2,4转速不变。增大3,减小1,那么飞机会做俯仰运动,同时会向后飞行 注意:这里增大的量必须要与减小的量相同才行,因为要保持这两组扭力矩之和为0不让它做偏航运动
十字模式左右/翻滚
这里与上面的十字模式左右一样,这里只需要一组电机进行改变就是了,比如保持1,3转速不变。增大4,减小2,那么飞机会做俯仰运动,同时会向后飞行 注意: 这里增大的量必须要与减小的量相同才行,因为要保持这两组扭力矩之和为0不让它做偏航运动
十字模式偏航
这里需要使用到两组电机,增大1,3转速,降低2,4转速,转向与电机1、电机3的转向相反。 这里不知道这两个的变化量需要一样吗
四旋翼不能再没有滚转或者俯仰的前提下,向左向右,向前向后移动
注意:对于多旋翼来说,一般来说,桨叶尺寸越大,越难改变角速度,也就是加速度越小
在大载重下,浆叶上下挥舞会导致刚性大的浆很容易折断。
PID控制理论
以上都是理想状态下,实际状态下可能由于电机的不平衡等各种因素,拿悬停举例。很可能起飞之后会侧翻。解决办法是使用遥控器进行实时控制,这样就会形成循环:观察->大脑计算->控制->观察->大脑计算->控制。
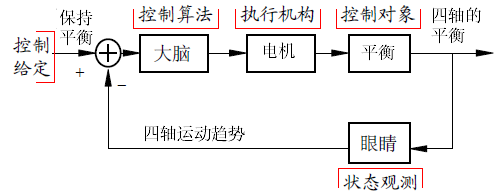
而由于人眼不能长时间观察,精确控制四个电机。我们需要一个自动反馈系统替代人操作来完成飞机的自稳定,我们人只需要控制飞机的方向和高度就可以了。这个系统中反馈由姿态传感器替代眼睛,而大脑则由单片机来替代。这时候该PID控制系统出场。
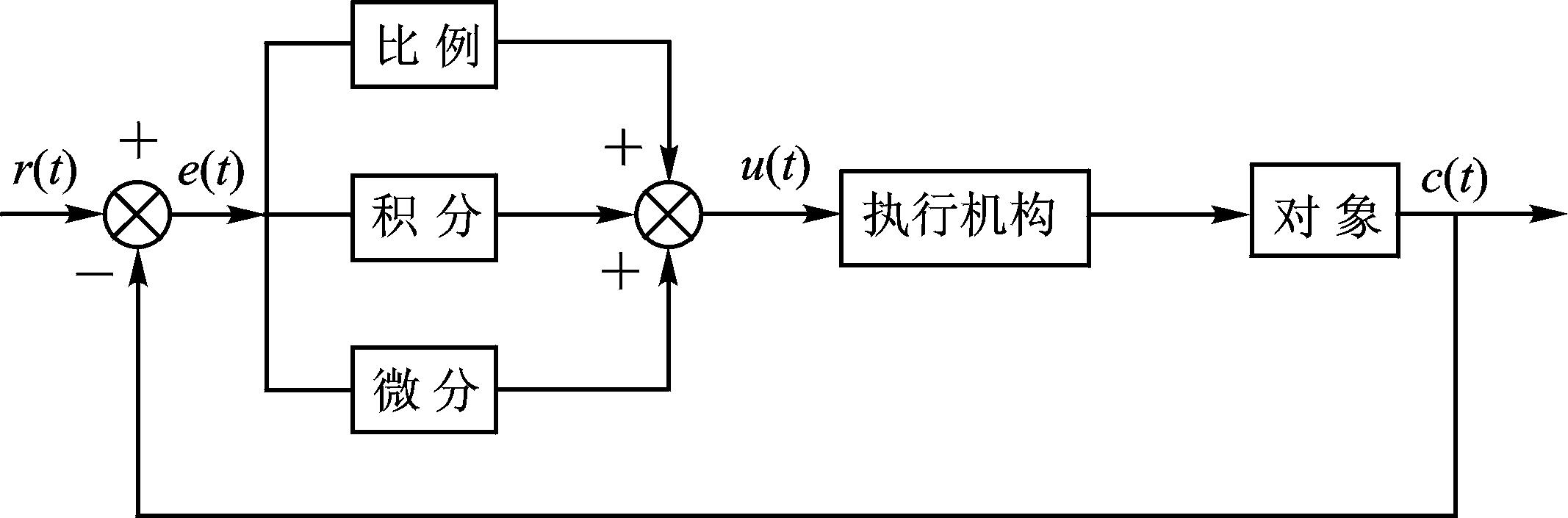
其中: 其中r(t)表示给定输入值,c(t)表示实际输出值,e(t)表示信号偏差量,u(t)表示修正量。
PID控制是最常见,应用最为广泛的自动反馈系统。PID控制器由偏差的比例(P,Proportional)、积分(I,Integral)和微分(D,Derivative)来对被控对象进行控制
。这里的积分或微分,都是偏差对时间的积分或微分。
参考链接:


- 本文作者: 蓉城蒲菊
- 本文链接: https://github.com/liangpu597/2020/07/24/多旋翼飞行器设计与控制学习—-1-基本概念/
- 版权声明: 本博客所有文章除特别声明外,均采用 MIT 许可协议。转载请注明出处!